It’s been a while since we last posted – largely for personal reasons, but also because we wanted to take some time to completely retool our approach to modeling elections.
In the past, we’ve tried a number of statistical approaches. Because every election is quite different to its predecessors, this proved unsatisfactory – there are simply too many things that change which can’t be effectively measured in a top-down view. Top-down approaches ultimately treat people as averages. But candidates and voters do not behave like averages; they have different desires and expectations.
We know there are diverse behaviours that need to be modeled at the person-level. We also recognize that an election is a system of diverse agents, whose behaviours affect each other. For example, a candidate can gain or lose support by doing nothing, depending only on what other candidates do. Similarly, a candidate or voter will behave differently simply based on which candidates are in the race, even without changing any beliefs. In the academic world, the aggregated results of such behaviours are called “emergent properties”, and the ability to predict such outcomes is extremely difficult if looking at the system from the top down.
So we needed to move to a bottom-up approach that would allow us to model agents heterogeneously, and that led us to what is known as agent-based modeling.
Agent-based modeling and elections
Agent-based models employ individual heterogeneous “agents” that are interconnected and follow behavioural rules defined by the modeler. Due to their non-linear approach, agent-based models have been used extensively in military games, biology, transportation planning, operational research, ecology, and, more recently, in economics (where huge investments are being made).
While we’ll write more on this in the coming weeks, we define voters’ and candidates’ behaviour using parameters, and “train” them (i.e., setting those parameters) based on how they behaved in previous elections. For our first proof of concept model, we have candidate and voter agents with two-variable issues sets (call the issues “economic” and “social”) – each with a positional score of 0 to 100. Voters have political engagement scores (used to determine whether they cast a ballot), demographic characteristics based on census data, likability scores assigned to each candidate (which include anything that isn’t based on issues, from name recognition to racial or sexual bias), and a weight for how important likability is to that voter. Voters also track, via polls, the likelihood that a candidate can win. This is important for their “utility function” – that is, the calculation that defines which candidate a voter will choose, if they cast a ballot at all. For example, a candidate that a voter may really like, but who has no chance of winning, may not get the voter’s ultimate vote. Instead, the voter may vote strategically.
On the other hand, candidates simply seek votes. Each candidate looks at the polls and asks 1) am I a viable candidate?; and 2) how do I change my positions to attract more voters? (For now, we don’t provide them a way to change their likability.) Candidates that have a chance of winning move a random angle from their current position, based on how “flexible” they are on their positions. If that move works (i.e., moves them up in the polls), they move randomly in the same general direction. If the move hurt their standings in the polls, they turn around and go randomly in the opposite general direction. At some point, the election is held – that is, the ultimate poll – and we see who wins.
This approach allows us to run elections with different candidates, change a candidate’s likability, introduce shocks (e.g., candidates changing positions on an issue) and, eventually, see how different voting systems might impact who gets elected (foreshadowing future work.)
We’re not the first to apply agent-based modeling in psephology by any stretch (there are many in the academic world using it to explain observed behaviours), but we haven’t found any attempting to do so to predict actual elections.
Applying this to the Toronto 2018 Mayoral Race
First, Toronto voters have, over the last few elections, voted somewhat more right-wing than might have been predicted. Looking at the average positions across the city for the 2003, 2006, 2010, and 2014 elections looks like the following:
 |
| Average voters' mayoral choices on economic and social issues (2003, 2006, 2010, 2014) |
This doesn’t mean that Toronto voters are themselves more right-wing than might be expected, just that they voted this way. This is in fact the first interesting outcome of our new approach. We find that about 30% of Toronto voters have been based on candidate likability, and that for the more right-wing candidates, likability has been a major reason for choosing them. For example, in 2010, Rob Ford’s likability score was significantly higher that his major competitors (George Smitherman and Joe Pantalone). This isn’t to say that everyone liked Rob Ford – but those that did vote for him cared more about something other than issues, at least relative to those who voted for his opponents.
For 2018, likability is less a differentiating factor, with both major candidates (John Tory and Jennifer Keesmaat scoring about the same on this factor). Nor are the issues – Ms. Keesmaat’s positions don’t seem to be hurting her standing in the polls as she’s staked out a strong position left of centre on both issues. What appears to be the bigger factor this time around is the early probabilities assigned by voters to Ms. Keesmaat’s chance of victory, a point that seems to have been a part of the actual Tory campaign’s strategy. Having not been seen as a major threat to John Tory by much of the city, that narrative become self-reinforcing. Further, John Tory’s positions are relatively more centrist in 2018 than they were in 2014, when he had a markedly viable right-wing opponent in Doug Ford. (To prove the point of this approach’s value, we could simply introduce a right-wing candidate and see what happens…)
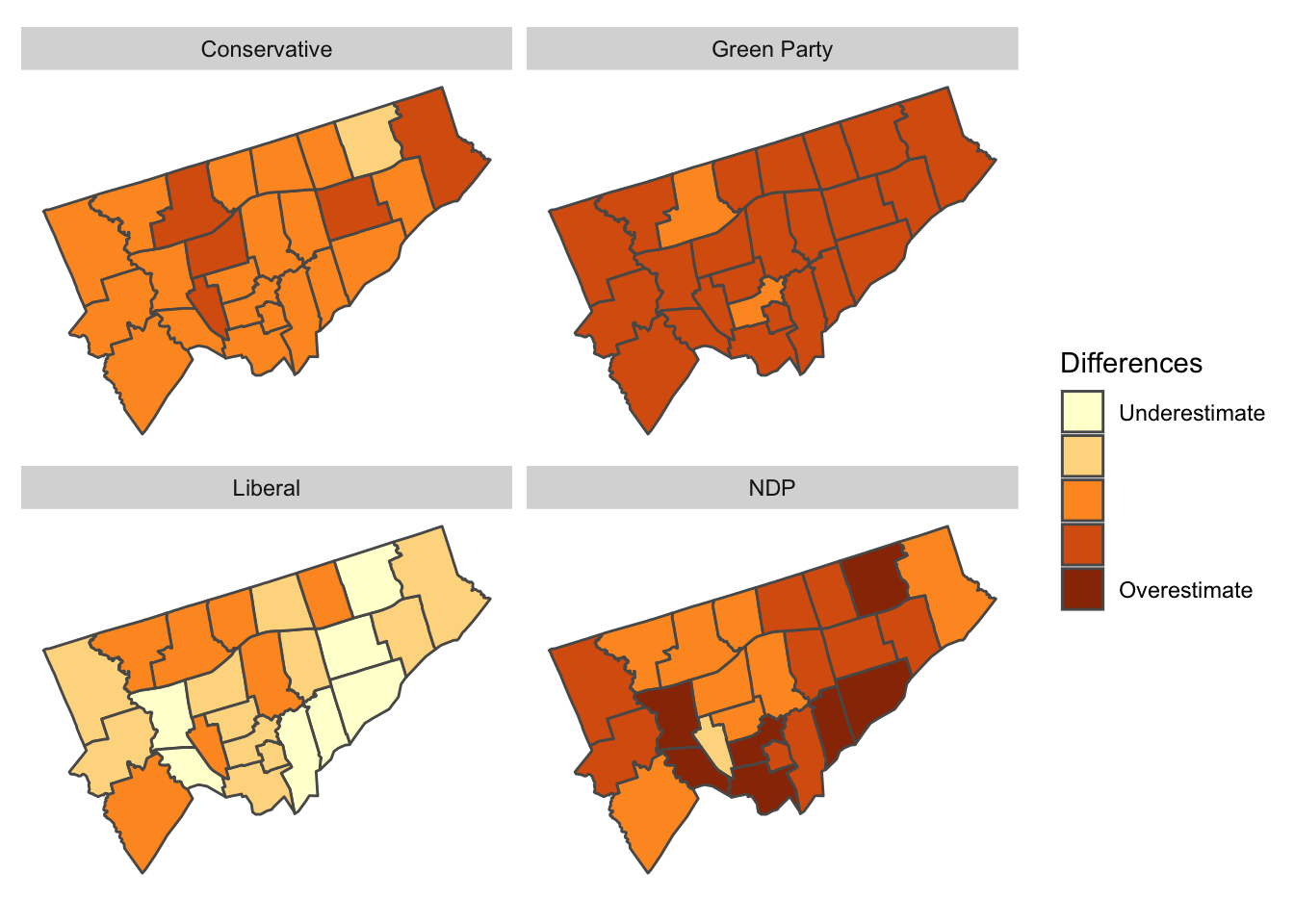
Thus, our predictions don’t appear to be wildly different from current polls (with Tory winning nearly 2-to-1), and map as follows:
 |
| PsephoAnalytics' 2018 Mayoral Race Predictions |
There will be much more to say on this, and much more we can do going forward, but for a proof of concept, we think this approach has enormous promise.